Table of Contents >> Show >> Hide
- What Is a Linear Actuator (and Why You Should Care)?
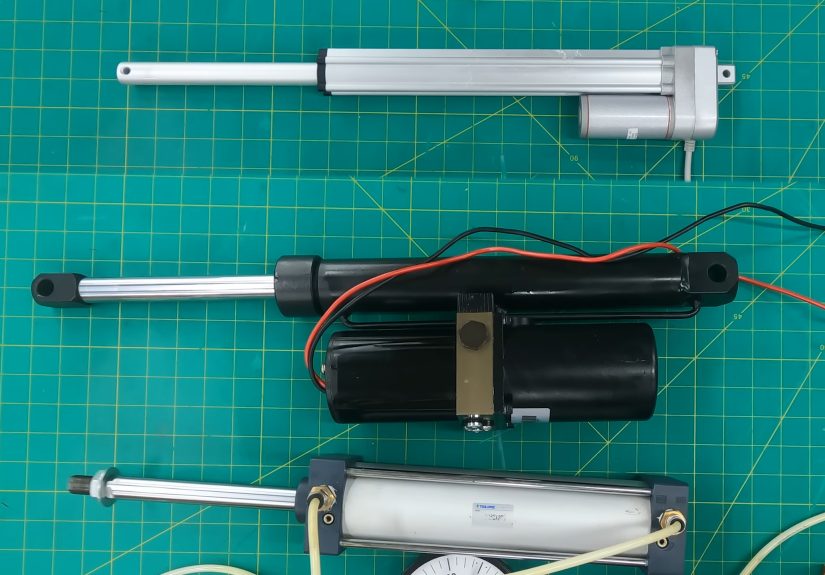
- Meet the Family: Common Linear Actuator Types
- Spec-Sheet Decoder Ring: What Really Matters
- Choose Like a Pro: A Quick Playbook
- Two Handy Equations (Feel Free to Steal)
- Integration Notes: Motors, Drives, and Motion Profiles
- Pitfalls & Pro Tips From the Shop Floor
- Mini Case Studies
- Conclusion
- Hands-On Experiences: What Actually Works ()
If you’ve ever turned a motor’s spin into a glorious, precise shove, congratulationsyou’ve built a linear actuator (or at least made one very confused motor). This guide is your fast, funny, and factual tour through the motors, screws, belts, specs, and “wait, why is it back-driving?!” moments that define linear motion. We’ll decode datasheets, compare technologies, drop a few practical formulas, and share field-tested tips so your next build slides like butter instead of seizing like a budget vise.
What Is a Linear Actuator (and Why You Should Care)?
A linear actuator turns energy (usually electrical) into straight-line motion under controlthink pushing, lifting, clamping, positioning. In control-system terms, it’s the element that takes a command and physically does the thing. Definitions from U.S. institutions like NIST frame actuators as the mechanism by which a controller acts on the environment; NASA’s projects underscore how actuators are foundational to robotics in harsh environments. Translation: if your project moves in a straight line on purpose, an actuator is the hero.
Meet the Family: Common Linear Actuator Types
Lead Screw (Trapezoidal/Acme) Actuators
The budget-friendly workhorse. A motor spins a threaded screw; a nut rides the threads to create linear motion. Friction is part of the design, which means lower efficiency than other options but also a delightful side effect: many lead-screw systems resist back-driving (self-locking) without a brakehandy for vertical loads. They’re quiet, simple, and great when loads are moderate and speeds aren’t wild.
Quick math: the torque to drive a lead screw is approximately T ≈ (Load × Lead) / (2π × η). When η (efficiency) is low, torque goes upand back-driving goes down. Datasheets from Thomson lay out that equation explicitly.
Ball Screw Actuators
This is the “less friction, more go” cousin. Recirculating balls between the nut and screw slash friction, boosting efficiency (~90% typical), speed, and service life. Expect better positioning and predictable wear models, at the cost of price and the tendency to back-driveso add a brake for vertical axes.
Planetary Roller Screw Actuators
When you need thrust for days and very long life, roller screws win. Multiple threaded rollers share the load, which means incredible force density and durabilityoften used in high-end industrial gear. They’re pricier and, like ball screws, easier to back-drive. Choose them when uptime is sacred and loads are high.
Belt-Driven (Rodless) Actuators
Belts trade some precision for blazing speed and long strokes. No critical speed limits from a spinning screw, fewer wear points, and great for gantries. They’re ideal for fast pick-and-place, packaging, and material handling. The trade-offs: lower repeatability than screws and occasional tuning challenges at long spans (belt stretch/sag).
Direct-Drive Linear Motors
Unroll a rotary motor and you get a linear motorno gears, no screws, no backlash. They offer high speed, precision, and responsiveness with minimal maintenance. You’ll size them by continuous and peak force (often defined at a specific coil temperature and duty), and pair them with precision feedback. If your application is about micron-level moves at meters-per-second, this is your jam.
Pneumatic (and a Word on Hydraulics)
Pneumatic cylinders are simple, cheap up front, and punchy at short strokesbut compressed air is notoriously inefficient and imprecise for multi-position profiles. Electric actuators shine when you need accuracy, programmability, and long-term energy savings. Hydraulics (not covered deeply here) rule when you need huge force in a compact package.
Spec-Sheet Decoder Ring: What Really Matters
Stroke, Force & Speed
They’re intertwined. For screws, increasing lead boosts top speed but reduces mechanical advantage (more torque needed). For belts, speed and travel are easy; for linear motors, speed and force are set by the motor constant and drive current. Use the classic screw torque relation and mind your motor/drive limits.
Accuracy vs. Repeatability
Accuracy is how close you get to the commanded position; repeatability is how tightly you cluster around it. Ball screws typically deliver excellent repeatability; preloading the nut reduces backlash (boosting repeatability) but doesn’t improve absolute accuracy. Belt systems often trade some repeatability for speed and stroke.
Backlash & Preload
Backlash is free motion between screw and nut. Non-preloaded nuts have backlash; preloaded nuts eliminate axial clearance, stiffen the system, and raise drive torque. If your process flips direction a lotor you’re chasing tight tolerancesbudget for preload.
Duty Cycle & Thermal Limits
Friction generates heat. Lead-screw gearboxes and screw jacks often carry explicit duty limits (e.g., 25–35%) unless you derate or cool them. Linear motors publish continuous vs. peak force at defined winding temperatures. Respect those numbers or invite mysterious accuracy drift and premature wear.
Environment: IP vs. NEMA Types
Ingress Protection (IP) ratings describe resistance to dust and water (IEC 60529). NEMA Type ratings cover broader conditions (e.g., corrosion/icing) and aren’t 1:1 with IP. For washdown, outdoor, or dusty lines, confirm the right rating for both actuator and enclosure.
Feedback: Encoders, Because Control Loops Like Facts
Incremental encoders count motion; absolute encoders know position at power-up. Optical encoders tend to offer high resolution; magnetic designs trade a bit of accuracy for robustness. When you need reliable homing or recovery after power loss, absolute feedback simplifies life.
Form Factor: Rod vs. Rodless
Rod-style actuators concentrate thrust and seal well against grimegreat pushers. Rodless actuators carry the load on a carriage and reclaim footprint while avoiding screw whip at long travel. Your mounting and load path will usually decide this one.
Choose Like a Pro: A Quick Playbook
- Fast pick-and-place across a meter: Belt-driven rodless or linear motor, depending on precision budget.
- Heavy vertical positioning: Ball screw (with brake) or roller screw when forces soar; lead screw if self-locking is essential.
- Lab instrument with tight repeatability: Preloaded ball screw with absolute encoder.
- Dusty, wet, or washdown: Rod-style electric or pneumatic with proper NEMA/IP ratings and boots.
- Micron-class metrology stage: Linear motor with high-resolution feedback and a stiff guideway.
Two Handy Equations (Feel Free to Steal)
1) Torque to Drive a Screw
T ≈ (F × Lead) / (2π × η) where F is axial load, Lead is screw lead per rev, and η is efficiency. Bigger lead = more speed, more torque; lower η = more torque (and often more self-locking).
2) Back-Drive Reality Check
Systems above ~50% efficiency tend to back-drive; machine-screw jacks with high gear ratios (20:1–32:1) are typically self-locking (absent vibration). Don’t rely on “probably fine” for vertical axesspec a brake if there’s any risk.
Integration Notes: Motors, Drives, and Motion Profiles
Electric actuators pair naturally with steppers or servos. Servos + absolute encoders nail multipoint profiles; steppers excel at cost-effective positioning with microstepping and closed-loop options. Electric systems also make S-curve moves and synchronized axes easier than pneumatics.
Pitfalls & Pro Tips From the Shop Floor
- Misalignment kills: Side loads on a screw nut cause binding and wear. Use proper linear guides or an actuator with integrated guidance.
- Mind your limits: Use limit switches and brakesdon’t count on mechanical hard stops; motors can deliver ugly stall torques.
- Belt tension is not a suggestion: Under-tension gives chatter; over-tension eats bearings. Check manufacturer tension methods.
- Thermals matter: Duty cycle limits are real. If hardware runs hot, derate, add cooling, or upsize.
- Pick ratings that match the environment: IP for dust/water; NEMA Types for broader conditions. Don’t mix them up.
Mini Case Studies
Fast cartesian gantry: A belt-driven X with a ball-screw Z gives speed where you want it and holding where you need it (plus a brake for Z).
Precision lab move: Ball screw, preloaded nut, absolute encoder, and conservative duty. It just sits there… exactly where you told it to.
Micron-level scanning: Linear motor stage with high-res feedbackno screw whip, no backlash. Your vibrations now have nowhere to hide.
Conclusion
There’s no “best” linear actuatoronly the best fit for your load, speed, precision, duty cycle, and environment. Start with the motion profile, choose a drive technology that naturally delivers it, and validate with the torque/force math. Get the ratings right, add the right feedback, and your machine will glide instead of grind. Then you can claim, with a straight face, that your robot pushes its weight aroundon purpose.
SEO Goodies
Hands-On Experiences: What Actually Works ()
Belts for speed, screws for hold: In packaging gantries I’ve helped spec, belts always won the X-axisstroke lengths of 1–2 meters with cycle times under a second are hard to beat. But the Z-axis was a different beast. Once you hang a few kilos of gripper and product under gravity, back-drive shows up the moment power drops. A simple spring-applied brake on a ball-screw Z made downtime safe and homing predictable. The time saved in commissioningno creeping Z during E-stoppaid for the brake on day one.
Preload is your steering alignment: On an optical pick-and-place, repeatability looked fine in one direction and terrible in the other. The culprit wasn’t the controller; it was backlash. Swapping to a preloaded ball-nut tightened the scatter by an order of magnitude. Current went up a bit (more torque to overcome preload), but the yield gains swamped the power budget hit. Pair that with absolute encoders and you can power-cycle without a home dancehuge for tools that hate losing their place.
Linear motors are honest about friction: When the spec says “micron-class over 400 mm, fast settle,” I stop pretending a screw will behave at any critical speed. A modest linear motor with ironless forcer on a good rail can hit speed and settle without fighting springy belts or screw windup. Yes, costs rise (and you need a clean environment), but the absence of mechanical compliance makes tuning almost… relaxing. It’s also maintenance-light: no nuts to grease, no belts to tension, and force constants that don’t drift if you keep it cool.
IP vs. NEMA confusion bitesplan early: A food-grade retrofit once arrived with “IP-rated” actuators that met the spray test yet corroded around mounts. That’s when you learn NEMA Type ratings aren’t equivalent to IP. We swapped to hardware vetted for both water ingress and corrosion exposure, added boots, and eliminated the Friday afternoon “why is axis two crunchy?” spray-down autopsies.
Air isn’t free: A noodle-cutting cell we converted from pneumatics had perfectly fine force needs but terrible energy bills and inconsistent end-stop impacts (and blade wear). Electric rod actuators cost more upfront, but energy and scrap dropped. The controls team loved being able to shape trapezoidal and S-curve profiles instead of slamming cylinders. Maintenance loved retiring the leak-hunt ritual. Everyone loved the power bill.
Tuning time: belts vs. screws: If your belt span gets long, tensioning and dynamic settling are the dragons you must slay. I’ve found that keeping spans short with idlers (or choosing a larger profile) cuts settling time. If precision must be higher, a ballscrew with proper supports is more forgiving to tune. And if precision must be highest, see “linear motors,” above.
Final advice: Start with the motion profile, be honest about the environment, and do the math on torque, duty, and thermals. The right actuator is the one you don’t notice after commissioningbecause it just moves, day in, day out.






