Table of Contents >> Show >> Hide
- Why This Self-Solving Rubik’s Cube Feels So Impossible
- What’s Inside the Self-Solving Rubik’s Cube Robot?
- How the Cube Solves Itself Without Cameras
- Why Miniaturization Is the Real Star of the Teardown
- How This Robot Compares With Other Rubik’s Cube Solvers
- The Solving Algorithm: Brains Meet Plastic
- What the Teardown Teaches About Great Maker Projects
- Specific Examples of Engineering Trade-Offs
- Experience Notes: What It Feels Like to Learn From a Teardown Like This
- Conclusion
- SEO Tags
At first glance, the self-solving Rubik’s Cube robot looks like a tiny haunted puzzle. Scramble it, set it on a table, and the cube begins turning its own faces until every color politely returns to its proper neighborhood. No giant robot arm. No dramatic camera rig. No helpful human hand hovering nearby like a nervous parent at a spelling bee. Just a cube, sitting there, apparently having a private conversation with physics.
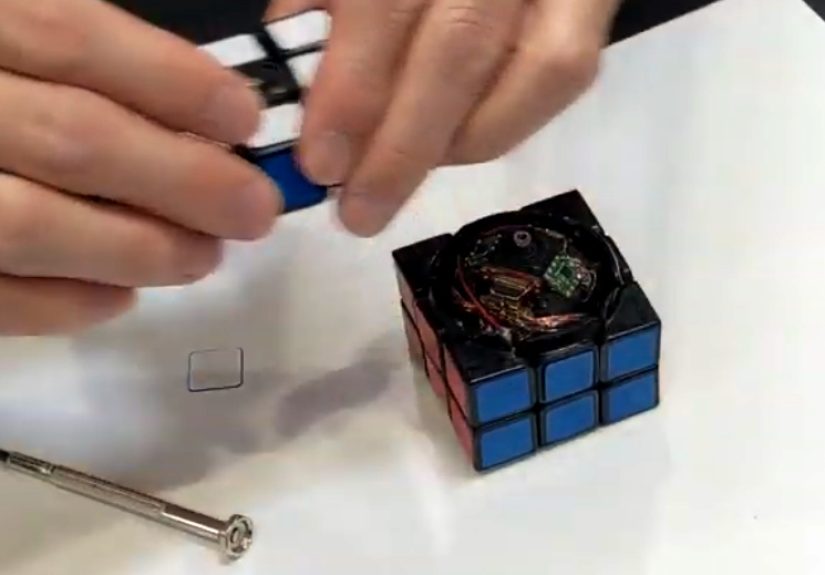
That is what makes the teardown so fascinating. The magic is not in a trick camera angle. It is hidden inside the cube itself: motors, gears, sensors, a battery, a microcontroller, and a remarkable amount of mechanical bravery packed into a space barely large enough for a normal Rubik’s Cube core. The self-solving Rubik’s Cube robot, created by Japanese maker Takashi Kaburagi, is not merely a puzzle that solves itself. It is a miniature robotics lab wearing six colorful faces.
This teardown-style look explores what is inside the self-solving Rubik’s Cube robot, how it detects movement, why its internal architecture is so clever, and what makers can learn from its design. It also places the project in context with traditional cube-solving robots, speedcubing algorithms, machine vision systems, and the wider world of robotic puzzle solving.
Why This Self-Solving Rubik’s Cube Feels So Impossible
Most Rubik’s Cube-solving robots are easy to understand visually. They usually surround the cube with arms, clamps, grippers, cameras, motors, or a frame that looks as if it escaped from a robotics competition. The robot holds the puzzle, scans the colors, calculates a solution, then twists the faces at high speed. Impressive? Absolutely. Subtle? Not exactly. Some of these machines look like they could also assemble a sandwich or interrogate a toaster.
Kaburagi’s self-solving cube flips that idea inside out. Instead of building a robot around the cube, he built the robot inside the cube. That single decision creates the entire engineering challenge. The device must preserve the appearance and behavior of a normal cube while replacing the original internal core with a dense robotic mechanism. It has to survive hand scrambling, know what changed, solve the puzzle, and then physically rotate its own layers from within.
The result is a project that feels less like a standard robot and more like a mechanical magic act. The cube does not need external cameras because it tracks its own rotations. It does not need a bulky robotic hand because each face is driven internally. It does not simply reverse the scramble; it recognizes the cube’s current arrangement and runs a solving method from that state. That is the difference between a cute gimmick and a serious embedded robotics achievement.
What’s Inside the Self-Solving Rubik’s Cube Robot?
A normal Rubik’s Cube contains a central core, center pieces, edges, and corners. The center pieces define the final color layout, while edge and corner pieces move around them. In a standard cube, the internal mechanism is designed for smooth manual turning. In the self-solving version, that familiar structure becomes a tiny motorized machine.
Inside Kaburagi’s cube are six sets of compact mechanical and electronic parts. Each set is responsible for one face of the cube. The documented design includes gears, motors, motor drivers, rotary position sensors, a single-board microcontroller, a battery, and an accelerometer. That is a lot to fit into a 57 mm cube, which is roughly the size of a standard 3×3 puzzle. If a normal Rubik’s Cube is a pocket puzzle, this one is a pocket-sized traffic jam of engineering.
1. Motors That Turn the Faces
The motors are the muscles of the self-solving Rubik’s Cube robot. Each motor drives a shaft connected to a face through a small gear system. When the microcontroller decides that a face must rotate, it sends a command to the motor driver. The motor turns, the gear train transfers motion, and the cube face rotates by the required amount.
This sounds simple until you remember that each face must stop accurately at 90-degree or 180-degree positions. A cube face that stops a few degrees short is not “almost solved”; it is mechanically confused. Precision matters because later moves depend on previous layers being aligned. One sloppy turn can cause binding, failed moves, or a tiny plastic tragedy.
2. Gears That Convert Motor Motion Into Cube Motion
Because the motors are small and space is painfully limited, the cube relies on gearing to transmit torque and control motion. The gears help convert motor rotation into usable face rotation. This also gives the design a compact mechanical advantage, allowing the cube to turn its own layers without requiring large motors.
In a teardown, gears are often the most satisfying parts to see. They reveal how the invisible motion path works. A motor alone is just a spinning cylinder. A gear train turns that spin into choreography. In this cube, that choreography must happen in six directions while leaving enough room for electronics, wiring, structural supports, and the cube pieces themselves.
3. Rotary Position Sensors That Track the Cube State
One of the smartest design choices is the use of rotary position sensors. Many cube-solving robots rely on cameras or color sensors to detect the scrambled state. Kaburagi’s cube instead keeps track of rotations as they happen. When a person twists a face by hand, the rotary sensor detects that motion, and the microcontroller updates the cube’s internal memory.
That means the cube always knows its own state, assuming it starts from a known solved arrangement when powered on. This approach reduces the need for extra color-detection hardware. It also makes the cube feel more self-contained. The trade-off is that the system must reliably detect every manual turn. If the cube loses track, it cannot simply look at itself in a mirror and say, “Ah yes, blue is having a crisis.”
4. A Microcontroller That Acts as the Brain
The microcontroller is the decision-making center. It stores the current cube state, receives sensor information, runs the solving logic, and commands the motor drivers. In larger robots, a desktop computer or laptop might handle solving. Here, the intelligence must live inside the cube itself.
Kaburagi chose a solving approach based on CFOP, a popular human speedcubing method whose name stands for Cross, First Two Layers, Orientation of Last Layer, and Permutation of Last Layer. A more brute-force or highly optimized computer solver may produce shorter solutions, but CFOP can be easier to adapt for a constrained embedded system. In the documented project, the CFOP-based program averaged more moves than a near-optimal computer solver, but it fit the personality and limitations of the cube beautifully.
5. A Battery Hidden in the Puzzle
No robot moves without power, and the self-solving Rubik’s Cube robot needs its own onboard battery. That creates a brutal packaging problem. The battery must be small enough to fit inside the cube, light enough not to ruin movement, and capable enough to power motors and electronics during a solve.
Power management is one of the less glamorous parts of robotics, but it is often where ambitious designs either survive or politely burst into disappointment. Motors draw current. Sensors need stable readings. A microcontroller must keep running cleanly. Inside a tiny cube, even wiring becomes a spatial negotiation.
6. An Accelerometer That Knows When the Cube Is Ready
The accelerometer helps the cube detect when it has been placed on a desk. This is important because the cube should not begin solving itself while a person is still scrambling it. Once placed down, the cube recognizes the condition and starts its solving routine.
That small detail makes the robot feel alive. It is not just executing a button press. It senses a change in its environment, waits for the right moment, then begins moving. This is the sort of interaction design that turns a technical project into a memorable demonstration.
How the Cube Solves Itself Without Cameras
The camera-free design is one of the most important ideas in the teardown. A typical robot solver scans all six faces, converts colors into a cube state, sends that state to an algorithm, and then executes the move list. Kaburagi’s self-solving cube skips the scanning step by tracking every twist through its internal sensors.
Imagine starting with a solved cube. The internal memory knows exactly where every piece belongs. When someone turns the right face clockwise, the rotary sensor detects that turn, and the software updates the virtual cube. Turn the top face twice, and the memory updates again. Continue scrambling, and the cube’s internal model follows along. By the time you set it down, the robot already knows the puzzle’s state.
This is elegant because it uses the cube’s own motion as the input. It is also risky because the system depends on accurate sensing. A missed move or ambiguous partial turn could corrupt the stored state. The engineering challenge is not only building a cube that moves; it is building one that understands what happened to it.
Why Miniaturization Is the Real Star of the Teardown
The most impressive part of the self-solving Rubik’s Cube robot is not any single component. It is the fact that all of those components coexist inside the puzzle. Motors need room. Gears need clearance. Wires need paths. The battery needs a safe location. Sensors need alignment. The outer pieces still need to move like a cube. Every millimeter is a negotiation, and the cube does not have many millimeters to spare.
Kaburagi’s early prototypes were larger, which is common in hardware development. When you are proving a mechanism, size is your friend. When you are trying to fit that mechanism into a standard cube, size becomes the villain wearing a tiny cape. Shrinking a robot is rarely a matter of simply scaling everything down. Smaller parts behave differently. Friction becomes more noticeable. Tolerances become less forgiving. Assembly becomes harder. Maintenance becomes a test of patience and tweezers.
That is why the teardown matters. Seeing the insides makes the achievement concrete. The outside looks playful; the inside reveals years of iteration, measurement, 3D modeling, printing, testing, failure, adjustment, and more testing. This is not a weekend novelty project. It is a deeply refined maker build.
How This Robot Compares With Other Rubik’s Cube Solvers
Cube-solving robots usually chase speed. MIT students built a robot capable of solving a Rubik’s Cube in 0.38 seconds. Purdue students later pushed the record to 0.103 seconds with a high-speed system using optimized vision, custom hardware, and specialized solving techniques. Those machines are astonishing. They are also very different from Kaburagi’s self-solving cube.
The external speed robots treat the cube as an object to manipulate. The self-solving cube treats the robot and the puzzle as one body. It is not trying to be the fastest solver in the world. It is trying to be the most surprising one. A giant frame that solves a cube quickly makes people say, “Wow, that robot is fast.” A cube that solves itself makes people lean closer and ask, “Wait, what is happening inside that thing?”
OpenAI’s robot hand project shows yet another direction: dexterous manipulation. Instead of building a cube-specific machine, the goal was to train a human-like robotic hand to manipulate the cube. That kind of research explores general robotic control, simulation training, and adaptation to uncertainty. Kaburagi’s project is narrower but more integrated. It does one magical thing in a beautifully compact way.
The Solving Algorithm: Brains Meet Plastic
Solving a Rubik’s Cube requires turning a messy arrangement into an ordered one. Computer solvers often use methods related to Herbert Kociemba’s two-phase algorithm, which breaks the solution search into stages and can produce short solutions efficiently. Many robot solvers use Kociemba-style methods because they are fast and practical.
Kaburagi’s cube uses CFOP, a method closely associated with human speedcubing. CFOP is not usually the shortest possible way to solve a cube, but it is structured and understandable: build the cross, solve the first two layers, orient the last layer, then permute it. In a tiny embedded robot, the best algorithm is not always the one with the fewest moves. It may be the one that is reliable, understandable, and suitable for the hardware.
This is a key robotics lesson. Software does not exist in a vacuum. A move sequence that looks efficient on paper may be awkward for the mechanism. A longer sequence may be safer, easier to execute, or more compatible with the sensors and motors. In robotics, elegance is not only mathematical. It is mechanical, electrical, and practical.
What the Teardown Teaches About Great Maker Projects
The self-solving Rubik’s Cube robot is a masterclass in constraint-driven design. The constraint is obvious: everything must fit inside the cube. But that single constraint creates dozens of smaller ones. How do you power it? How do you sense turns? How do you prevent wires from interfering with motion? How do you stop precisely? How do you keep the cube recognizable as a cube?
Great maker projects often begin with a sentence that sounds unreasonable. “What if the cube solved itself?” is exactly that kind of sentence. It is simple enough for anyone to understand, but hard enough to require serious engineering. That combination is powerful. People do not need a robotics degree to appreciate the result, but engineers can spend hours admiring the details.
The teardown also reminds us that physical computing is full of compromise. The smallest design choice can shape the entire project. Choosing rotary sensors instead of cameras changes the sensing strategy. Choosing internal motors changes the structure. Choosing CFOP changes the software. Choosing a standard-size cube changes everything.
Specific Examples of Engineering Trade-Offs
Camera-Free Recognition vs. Visual Scanning
Using rotary sensors avoids the need for cameras and color recognition. That saves space and makes the cube more self-contained. The trade-off is that the cube must know its starting state and accurately record every turn. External robots can rescan the cube if needed; this cube depends on continuous internal awareness.
Internal Motors vs. External Arms
External arms can be larger, stronger, and easier to repair. Internal motors make the device look magical but create extreme packaging challenges. The self-solving cube chooses wonder over convenience. Any maker who has tried to cram electronics into a tiny enclosure knows that this is the path where sanity goes to do push-ups.
Move Efficiency vs. Mechanical Reliability
A shorter solution is not always better if the hardware struggles to execute it. A slightly longer but more predictable sequence can be better for a compact robot. This is especially true when gears, sensors, and face alignment must work perfectly together.
Experience Notes: What It Feels Like to Learn From a Teardown Like This
Watching or studying a teardown of the self-solving Rubik’s Cube robot is different from reading a normal product review. A review asks, “Does it work?” A teardown asks, “How did anyone convince this to work?” That second question is where the fun lives.
The first experience most viewers have is disbelief. The cube twists itself, pauses, turns again, and seems to think. Your brain knows there must be motors inside, but the familiar shape of the Rubik’s Cube fights that explanation. We are used to cubes being passive objects. They sit in drawers, mock us from desks, and occasionally make us question our spatial intelligence. Seeing one move on its own feels like watching a paperclip file taxes.
The next experience is curiosity. Once the outer mystery fades, the internal design becomes more interesting than the trick. You begin to notice how many problems had to be solved at once. The cube must be strong enough to be handled, loose enough to rotate, precise enough to align, and smart enough to track its state. It must store power, process information, and move plastic layers without tearing itself apart. That combination makes the project feel less like a toy and more like a compact robot disguised as nostalgia.
For makers, the teardown is also encouraging. Kaburagi did not begin with every skill fully mastered. The project involved learning, prototyping, 3D printing, CAD modeling, electronics, and repeated trial and error. That matters because polished builds can sometimes discourage beginners. They look too perfect, as if they were born fully assembled under a laser cutter. A good teardown reveals the opposite: the final object is the survivor of many imperfect versions.
There is also a practical lesson in respecting tolerances. In software, a tiny mistake may be fixed with a quick edit. In hardware, a tiny mistake can mean a gear rubs, a wire catches, a sensor misreads, or a face stops two degrees short. The self-solving cube teaches that mechanical design is not just about making parts fit in a drawing. It is about making them behave together in the real world, where friction, flex, weight, and manufacturing imperfections all get a vote.
The most memorable experience is the moment you realize that the cube’s intelligence is not only in its code. It is distributed across the entire design. The gears encode motion. The sensors encode awareness. The accelerometer adds context. The microcontroller coordinates behavior. The physical shape limits and defines what the software can do. That is the beauty of embedded robotics: the “brain” is everywhere.
Finally, the teardown gives a useful reminder for anyone building ambitious projects: choose a clear, delightful goal. “A robot that solves a cube from the inside” is easy to explain and hard to forget. It has spectacle, technical depth, and charm. The best maker projects often live in that sweet spot. They make experts nod, beginners smile, and everyone else ask the most important engineering question of all: “Can I see what’s inside?”
Conclusion
The self-solving Rubik’s Cube robot is not just a clever puzzle. It is a compact example of mechanical design, embedded electronics, sensor fusion, motion control, and algorithmic problem solving. Its teardown reveals a world of motors, gears, drivers, sensors, battery power, and microcontroller logic hidden inside a familiar cube. What looks like a tiny haunted toy is actually a carefully engineered machine with a very serious sense of humor.
Compared with external cube-solving robots that chase record-breaking speed, Kaburagi’s creation wins in a different category: wonder. It preserves the shape of the original puzzle while transforming its inside into a robotic core. That is why the self-solving Rubik’s Cube robot remains such a memorable project. It does not merely solve the cube. It solves the question of how much engineering can fit inside an object we thought we already understood.